【2026年はフィジカルAI元年!?】産業用ロボット・協働ロボットの安全規制|2026年以降の法整備の方向性

産業用ロボットの安全規制が、あなたの現場でどのように変わろうとしているかご存知ですか?製造業をはじめとする立ち仕事の現場では、協働ロボット(コボット)の導入が急速に進んでいます。経済産業省のデータによると、日本のロボット出荷台数は2024年時点で年間約25万台規模に達し、特に人と同じ空間で稼働する協働ロボットの市場は年率20%以上の成長を続けています。
しかし、ロボットの普及が進むほど重要になるのが安全規制の整備です。労働安全衛生規則(安衛則)や国際安全規格は、技術の進歩に合わせて見直しが進められています。2013年の規制緩和を転機に、安全柵なしでロボットと人が協働できる時代が到来しましたが、それに伴うリスクアセスメントの重要性はかつてないほど高まっています。
この記事では、産業用ロボットと協働ロボットの安全規制の現状から、2026年以降の法整備の方向性までを体系的に解説します。
この記事でわかること
- 産業用ロボットに関する安衛法・安衛則の安全規制の基本的な枠組み
- 2013年の規制緩和による協働ロボット普及の経緯と安全基準の変遷
- ISO 10218とISO/TS 15066に基づく国際安全規格の要点
- リスクアセスメントに基づく安全柵なし運用の条件と実務上のポイント
- 高齢労働者の負担軽減を含む今後の規制動向と立ち仕事現場への影響
産業用ロボットの安全規制の基本的な枠組み
安衛則第150条の3〜5が定める安全ルール
産業用ロボットの安全規制は、労働安全衛生法(安衛法)に基づく労働安全衛生規則(安衛則)第150条の3〜第150条の5が中心的な役割を果たしています。
安衛則第150条の4では、産業用ロボットの可動範囲内に労働者が立ち入ることを原則として禁止しています。具体的には、運転中のロボットに労働者が接触する危険がある場合、事業者は安全柵の設置や自動停止装置の設置といった措置を講じなければなりません。
また、安衛則第150条の3では産業用ロボットの検査等を行う際の措置が、第150条の5ではロボットの運転開始時の措置がそれぞれ定められています。これらの規定は、ロボットと人が接触した場合に重大な災害につながるリスクを踏まえたものです。
従来の安全確保の考え方
長年にわたり、産業用ロボットの安全確保は「人とロボットを物理的に隔離する」という考え方が主流でした。工場のロボットセルの周囲に安全柵を設け、人がその中に入る際はロボットを停止させるという運用が一般的だったのです。
この方式は安全性の面では確実ですが、以下のような課題がありました。
- 広い設置スペースが必要(安全柵の分だけ余分な面積を占有)
- 人とロボットの作業分担が柔軟にできない
- 小ロットの多品種生産に対応しにくい
- ロボットの設置・レイアウト変更に時間とコストがかかる
特に中小の製造現場や食品加工業など、限られたスペースで立ち仕事をしながらロボットを活用したい事業者にとって、安全柵の設置は大きなハードルとなっていました。
2013年の規制緩和と協働ロボットの普及
80W出力制限の撤廃
産業用ロボットの安全規制における大きな転機は、2013年12月の厚生労働省通達(基発1224第2号)です。この通達により、それまで実質的に80W以下の出力に制限されていた人との協働作業が、一定の安全条件を満たせば出力制限なく認められるようになりました。
従来、安衛則第150条の4のただし書きにおいて「労働者に危険が生ずるおそれのないとき」は安全柵が不要とされていましたが、この「危険が生ずるおそれのないとき」は80W以下の出力のロボットに限られると解釈されていました。2013年の通達では、国際安全規格に基づくリスクアセスメントを実施し、十分な安全対策を講じた場合には、80Wを超える出力のロボットであっても安全柵なしで運用できることが明確化されたのです。
協働ロボット市場の拡大
この規制緩和を受けて、協働ロボット(コボット: Collaborative Robot)の市場は急速に拡大しました。協働ロボットとは、安全柵なしで人と同じ作業空間で稼働できるように設計されたロボットのことです。
協働ロボットの主な特徴は以下の通りです。
- 衝突検知機能: 人やモノに接触した際に即座に停止または力を制限する
- 低速・低出力運転: 人との接近時に自動的に速度を落とす
- 丸みを帯びたデザイン: 挟み込みのリスクを低減する形状
- 簡易なプログラミング: 現場の作業者がティーチング(動作教示)可能
国際ロボット連盟(IFR)の統計によると、協働ロボットの世界出荷台数は2023年に約10万台を超え、産業用ロボット全体に占める割合は約10%に達しています。日本国内でも、自動車部品、電子機器、食品加工などの分野で導入が進んでいます。
国際安全規格の体系:ISO 10218とISO/TS 15066
ISO 10218:産業用ロボットの安全要求事項
産業用ロボットの安全基準の国際的な基盤となるのが、ISO 10218(産業用ロボット−安全要求事項)です。この規格はPart 1(ロボット本体)とPart 2(ロボットシステムおよびインテグレーション)の2部で構成されています。
ISO 10218では、産業用ロボットの安全設計に関する基本的な要求事項が定められており、以下の4つの協働運転モードが規定されています。
| 協働運転モード | 概要 | 主な用途 |
|---|---|---|
| 安全等級の監視停止 | 人が協働作業空間に入るとロボットが停止 | 人が頻繁に出入りする作業 |
| ハンドガイディング | 作業者がロボットを手で直接操作 | ティーチングや位置調整 |
| 速度・間隔の監視 | 人との距離に応じてロボット速度を制御 | 広い空間での協働作業 |
| 出力・力の制限 | 接触時の力やエネルギーを制限値以下に保つ | 近接での協働作業 |
ISO/TS 15066:協働ロボットの安全ガイドライン
ISO/TS 15066(ロボットおよびロボティックデバイス−協働ロボット)は、ISO 10218を補完する技術仕様書として2016年に発行されました。協働ロボットの安全設計と運用に関する、より具体的なガイドラインを提供しています。
特に重要なのが、人体の各部位に対する接触力の許容値が具体的に数値化されている点です。たとえば、手の甲への準静的接触力(ロボットと人体が押し付けられた状態の力)は最大150N、頭部では最大65Nと定められています。この基準があることで、協働ロボットの設計者やインテグレーターは、安全性を定量的に評価することが可能になりました。
ISO/TS 15066は現在、正式な国際規格(ISO規格)への格上げが検討されており、今後の改訂によって基準値の見直しや新たな要求事項の追加が見込まれています。
リスクアセスメントに基づく安全柵なし運用の条件
リスクアセスメントの基本プロセス
協働ロボットを安全柵なしで運用するためには、リスクアセスメントの実施が不可欠です。これは2013年の規制緩和においても明確に求められている条件です。
リスクアセスメントの基本的なプロセスは以下の通りです。
- 危険源の特定: ロボットの動作範囲、把持する部品、周辺設備等との関係で、人に危害を及ぼす可能性のある要因を洗い出す
- リスクの見積もり: 危害の重篤度と発生可能性を組み合わせてリスクレベルを評価する
- リスク低減措置の実施: 本質的安全設計(設計段階での対策)、安全防護(センサー・安全装置等)、使用上の情報提供(警告表示・教育等)の3段階で対策を講じる
- 残留リスクの評価: 対策後もなお残るリスクが許容可能なレベルであることを確認する
安全柵なし運用の具体的条件
安全柵を設けずに協働ロボットを運用するためには、リスクアセスメントの結果に基づき、以下のような安全対策が求められます。
- ロボット本体の安全機能: 衝突検知、力制限、速度制限等のISO 10218準拠の機能が有効であること
- 作業空間の管理: ロボットの動作範囲と人の作業範囲を明確にし、必要に応じてエリアセンサーやライトカーテンを設置
- 作業者への教育: 協働ロボットとの安全な作業方法について十分な教育・訓練を実施
- 定期的な点検・メンテナンス: 安全機能が正常に作動していることの定期確認
- 緊急停止装置: 作業者が容易にアクセスできる位置に非常停止ボタンを配置
製造業の現場では、リスクアセスメントの実施体制や記録の整備が不十分なケースも見受けられます。厚生労働省は、ロボットメーカーやシステムインテグレーターと連携して、中小企業向けのリスクアセスメントガイドの充実を進めています。
製造業での協働ロボット導入事例と安全対策
自動車部品製造での活用
自動車部品の製造現場では、組立工程や検査工程で協働ロボットの導入が進んでいます。たとえば、重量のある部品のハンドリングや、繰り返し精度が求められるねじ締め作業などを協働ロボットが担い、作業者は品質確認や段取り替えに集中するという分担が一般的です。
安全対策としては、力制限機能に加えて、3Dビジョンセンサーによる人の検知や、作業エリアの色分け表示(ロボット動作範囲を床に明示)などが組み合わせて実施されています。
食品加工業での活用
食品加工業は、立ち仕事の多い業種の代表格です。パッキングや箱詰め、パレタイジング(積み付け)といった作業に協働ロボットが導入されるケースが増えています。
食品加工業では衛生面への配慮も必要であるため、防水・防塵仕様の協働ロボットが選定されます。安全面では、作業者が頻繁にロボットの近くを通るため、速度・間隔の監視モードを活用し、人が近づくとロボットが自動的に減速する設定が採用されることが多いです。
高齢労働者の負担軽減としての活用
協働ロボットの導入は、高齢労働者の身体的負担を軽減する手段としても注目されています。製造業の現場では、60歳以上の労働者が増加しており、重量物の持ち上げや長時間の立ち作業が身体への大きな負荷となっています。
協働ロボットに重量物のハンドリングや反復作業を任せることで、高齢労働者は身体的負荷の少ない監視・品質管理業務に集中できるようになります。これは、2026年4月施行の安衛法改正で努力義務化された高年齢労働者の労災防止の観点からも、有効な対策の一つと位置づけられます。
アルケリスが取り組む立ち仕事の負担軽減という課題においても、協働ロボットの適切な導入は、作業者の身体的負担を分散させる有力な選択肢といえるでしょう。
2026年以降の安全規制の方向性
国内規制の動向
日本国内では、産業用ロボットの安全規制に関して以下の動きが注目されています。
安衛則の見直し検討
2013年の通達による規制緩和から10年以上が経過し、協働ロボットの技術と普及状況は大きく変化しました。厚生労働省では、協働ロボットの安全に関する知見の蓄積を踏まえ、安衛則の規定そのものを現代の技術水準に合わせて見直す検討が進められています。
リスクアセスメントの義務化強化
2026年の安衛法改正では、化学物質管理におけるリスクアセスメントの強化が柱の一つとなっていますが、ロボット安全の分野においても、リスクアセスメントに基づく自律的な安全管理の方向性が一層強まると考えられます。形式的なチェックリストではなく、現場の実態に即した実効性のあるリスクアセスメントが求められるようになるでしょう。
国際規格の改訂動向
国際的には、以下の規格改訂が進行中です。
- ISO 10218の改訂: 2024年に改訂版が発行され、協働運転モードの要求事項がより詳細化されました。日本でもJIS B 8433として国内規格への反映が進められています
- ISO/TS 15066のISO化: 技術仕様書(TS)から正式な国際規格(IS)への格上げが検討中です。接触力の許容値の見直しや、新たな安全評価手法の追加が議論されています
- AI搭載ロボットの安全基準: 人工知能を搭載したロボットの安全性評価に関する新たな規格の策定が進められています。予測が困難なAIの振る舞いをどう安全に管理するかが課題です
立ち仕事の現場に求められる対応
今後の規制動向を踏まえ、立ち仕事の現場では以下のような対応が求められます。
- 最新の安全規格への対応状況の確認: 既に協働ロボットを導入している現場では、ISO 10218改訂版への適合状況を確認する
- リスクアセスメントの定期的な見直し: 作業内容や作業者の変更に応じて、リスクアセスメントを更新する
- 作業者教育の継続: ロボットの安全な取り扱いに関する教育を定期的に実施する
- 高齢労働者への配慮: 協働ロボットの導入計画に、高齢労働者の負担軽減の視点を取り入れる
まとめ
産業用ロボットの安全規制は、「人とロボットを物理的に隔離する」時代から、「リスクアセスメントに基づいて人とロボットが安全に協働する」時代へと大きく転換しています。2013年の80W出力制限の撤廃を契機に、協働ロボットの普及は加速し、ISO 10218やISO/TS 15066といった国際安全規格がその安全性の基盤を支えています。
2026年以降は、安衛則の見直し検討やISO規格の改訂、AI搭載ロボットの安全基準策定など、安全規制がさらに進化していくことが見込まれます。特に立ち仕事の現場では、協働ロボットの導入が作業者の身体的負担軽減と安全性の向上を同時に実現する有効な手段として、その重要性が一層高まっていくでしょう。
事業者にとって重要なのは、規制の変化を受け身で待つのではなく、リスクアセスメントを軸とした自律的な安全管理体制を構築し、最新の技術と規格を積極的に取り入れていく姿勢です。人とロボットが安全に共存する現場づくりは、労働者の安全と生産性の向上を両立させるための鍵となります。
参考文献
- 厚生労働省, 「労働安全衛生規則 第150条の3〜第150条の5」. https://www.mhlw.go.jp/
- 厚生労働省, 「平成25年12月24日付基発1224第2号通達(産業用ロボットに係る労働安全衛生規則第150条の4の施行通達)」, 2013年.
- ISO, “ISO 10218-1:2024 Robotics — Safety requirements for robot systems in an industrial environment — Part 1: Robots”, 2024.
- ISO, “ISO 10218-2:2024 Robotics — Safety requirements for robot systems in an industrial environment — Part 2: Robot systems, robot applications and robot cells”, 2024.
- ISO, “ISO/TS 15066:2016 Robots and robotic devices — Collaborative robots”, 2016.
- International Federation of Robotics (IFR), “World Robotics 2024 — Industrial Robots”, 2024. https://ifr.org/
- 経済産業省, 「ロボット産業の市場動向」, 2024年. https://www.meti.go.jp/
- 厚生労働省, 「労働安全衛生法等の一部を改正する法律」, 2025年5月14日公布. https://www.mhlw.go.jp/
- 日本ロボット工業会(JARA), 「ロボット産業の出荷統計」, 2024年. https://www.jara.jp/
「立ちっぱなし」でお悩みはありませんか?
✔︎ 足裏が痛い
✔︎ 腰痛がつらい
✔︎ ふくらはぎがむくむ
✔︎ ヒザが痛い
✔︎ 姿勢の悪化
✔︎ 全身疲労
✔︎ 足裏が痛い
✔︎ 腰痛がつらい
✔︎ ふくらはぎがむくむ
✔︎ ヒザが痛い
✔︎ 姿勢の悪化
✔︎ 全身疲労
立ち姿勢の負担軽減
「スタンディングレスト」
という新発想!

立ち作業の負担軽減デバイス
アルケリスは立ち姿勢の負荷軽減デバイスを販売中です。職場環境に合わせて、疲労軽減ジェルマット、スタビ ハーフ、スタビフルから選ぶことができます。立ち仕事の身体疲労を軽減し、働く人に選ばれる職場づくりをサポートします。
その他の負荷軽減デバイス
上肢の負担や局所疲労の軽減にフォーカスした製品ライン SUTIX by Ottobock を販売中です。熱暑対策・腰痛対策に加え、手首や首の疲労のためのサポートデバイスで安心安全な職場づくりを実現します。

CX COOL SLEEVE
水で濡らすだけ。最大12℃の冷却効果で、腕の疲労と暑熱ストレスを軽減するクールスリーブ。

CX SOFT WRIST
手首をやさしく支え、反復作業による負担を軽減するソフトリストサポート。

CX SOFT BACK
背中をやさしく支え、前傾・中腰作業の負担を軽減するソフトバックサポート。

CX EASY NECK
首・頸椎をやさしく支える、軽量ネックサポート。頭上作業時の首負担を軽減するサポートデバイス。
製品写真(スタビハーフ)






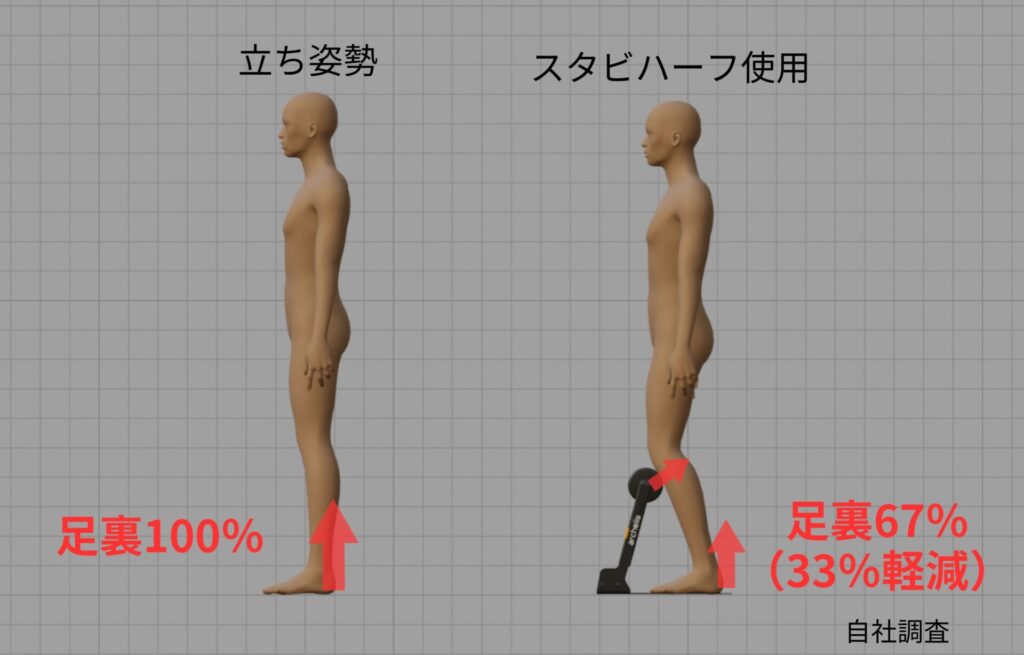
身体負荷を軽減する
立ち姿勢では体重負荷が100%足裏に集中して、足や腰に負担がかかります。スタビハーフは体重を分散して支えるため、足裏への負荷を最大33%軽減することができます。
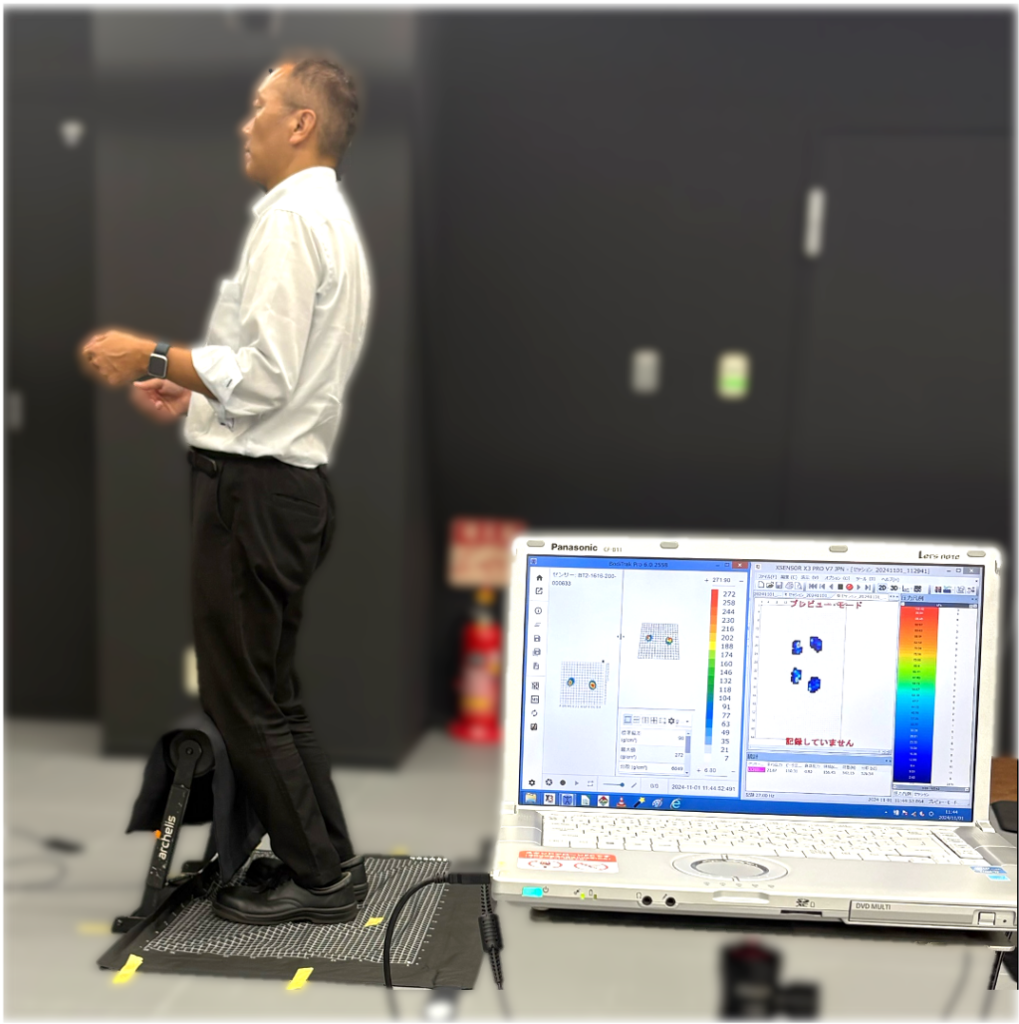
負荷軽減の検証データ
実証実験において、スタビハーフによる体重分散効果が示されました。
立ち姿勢とスタビハーフ使用時における体にかかる荷重を、圧力分布センサを用いて計測したところ、スタビハーフの使用により足裏の荷重が最大30%程度軽減することが明らかになりました。
スネ部のロールクッションが体重の一部を優しく支えることで、足裏の荷重が軽減していることがデータから示されました。
関連記事
魔改造の夜 特設サイト 開発秘話を公開中!!